Method and apparatus for singularity avoidance for control moment gyroscope (CMG) systems without using null motion
| dc.contributor.author | Agrawal, Brij N. | |
| dc.contributor.author | Kim, Jae Jun | |
| dc.contributor.author | Sands, Timothy Andrew | |
| dc.date.accessioned | 2017-02-16T23:23:45Z | |
| dc.date.available | 2017-02-16T23:23:45Z | |
| dc.date.issued | 2017-02-14 | |
| dc.identifier.other | US 9,567,112 B1 | |
| dc.identifier.uri | https://hdl.handle.net/10945/51921 | |
| dc.description | Patent | en_US |
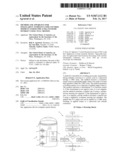
| dc.description.abstract | A method is described for avoiding gyrocopic singularities during attitude correction to a sytem, such as a spacecraft having a CMG array. The method receives a corrective torque vector µ and gimbal angle values δ for each of at least three gimbal within the CMG array. The method a a Jacobian matrix A as a function of gimbal angle value δ. A. lf the determinant is not equal to zero, it is not singular, and the method calculate a gimbal rate δ using a using a pseudo-inverse steering law equation. lf the determinant is equal to zero, it is singular, and the method calculate a gimbal rate δ using a singularity avoidance steering law equation. The gimbal rate δ is output and can be applied to a CMG array resulting in applied torque to a spacecraft and attitude correction. | en_US |
| dc.publisher | The United States of America as represented by the Secretary of the Navy, Washington, DC (US) | en_US |
| dc.rights | This publication is a work of the U.S. Government as defined in Title 17, United States Code, Section 101. Copyright protection is not available for this work in the United States. | en_US |
| dc.title | Method and apparatus for singularity avoidance for control moment gyroscope (CMG) systems without using null motion | en_US |
| dc.type | Patent | en_US |
| dc.contributor.corporate | Monterey, California, Naval Postgraduate School | |
| dc.contributor.corporate | Monterey, California : Naval Postgraduate School |
Files in this item
This item appears in the following Collection(s)
Related items
Showing items related by title, author, creator and subject.
-
Attitude Dynamics/Control of Dual-Body Spacecraft with Variable-Speed Control Moment Gyros
(2004);The dynamics equations of a spacecraft consisting of two bodies mutually rotating around a common gimbal axis are derived by the use of the Newton–Euler approach. One of the bodies contains a cluster of single-gimbal var ... -
Angularly unbounded three-axis spacecraft simulator
(The United States of America, as represented by the Secretary of the Navy, Washington, DC (US), 2020-04-14);A method of simulating 3-degrees of freedom spacecraft rotational dynamics is provided that includes attaching a payload, using a spherical air bearing, to an inner gimbal of a 3-axis gimbal, where the 3-axis gimbal includes ... -
Singular Lines in the Parameter Plane
(Monterey, California. Naval Postgraduate School, 1967-06);The theory of Singular Lines, constant damping ratio-constant undamped natural frequency lines, is derived. A limitation of the parameter plane method for characteristic polynomials whose coefficients are linear functions ...


